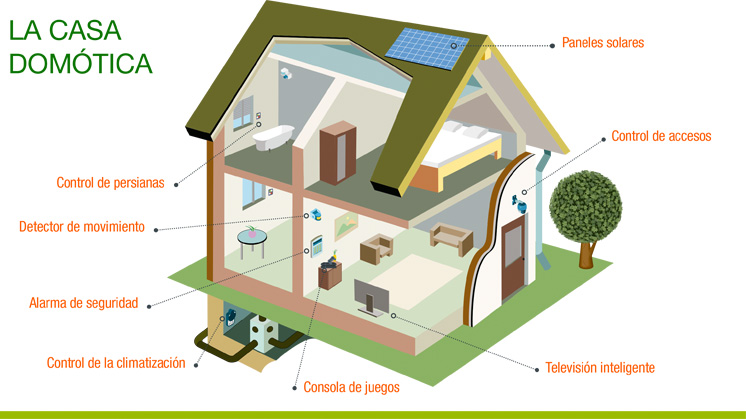
Sensor PIR con Arduino
Sensor PIR piroeléctrico con Arduino UNO. Primeramente, en este tutorial les enseñaremos a usar el sensor de movimiento, también conocido como sensor infrarrojo pasivo ó piro eléctrico. Este, de hecho es un sensor electrónico que utiliza la luz infrarroja irradiada por los objetos que se encuentran en su campo de visión. En este caso su distancia máxima es de 6 metros. Básicamente son fabricados de un material cristalino que genera cargas eléctricas cuando se expone a la radiación infrarroja. En conclusión, los voltajes que manda varían según la radiación que detecte el sensor. Estos voltajes son medidos por medio de un amplificador.

Sensor PIR comercial
Los módulos convencionales, usualmente, contiene lentes ó filtros especiales llamados lentes de fresnel. Las lentes de fresnel son aquellas que enfocan las señales, en este caso infrarrojas, del ambiente. Cuando los sensores piroeléctricos detectan un cambio de señal, el sensor cambia rápidamente y el amplificador activa la salida para indicar que hay movimiento. En este caso, esta salida permanece activa durante unos segundos para que el microcontrolador o Arduino pueda tomar una decisión si hubo movimiento o no.
Este sensor cuenta con tres terminales, solamente una se utiliza para la alimentación que maneja en este caso es de 5 volts la otra terminal es para la tierra y la última es la salida de detección de movimiento. Por lo tanto, este sensor da de salida una señal digital, esto significa que solo maneja dos voltajes o niveles lógicos.
El sensor de humedad
 El sensor de humedad es un aparato de lectura utilizado en espacios interiores para controlar la humedad del aire y la temperatura. Las magnitudes medidas por el sensor de humedad se transforman en una señal eléctrica normalizada, cuya intensidad suele estar comprendida entre 4 y 20 mA. Un material semiconductor es el encargado de determinar con precisión los valores de humedad y temperatura que se corresponden con la señal emitida. Este tipo de sensores son especialmente útiles en los sistemas de ventilación mecánica higrorregulables, ya que permiten regular el caudal de aire renovado en función de la humedad ambiental.
El sensor de humedad es un aparato de lectura utilizado en espacios interiores para controlar la humedad del aire y la temperatura. Las magnitudes medidas por el sensor de humedad se transforman en una señal eléctrica normalizada, cuya intensidad suele estar comprendida entre 4 y 20 mA. Un material semiconductor es el encargado de determinar con precisión los valores de humedad y temperatura que se corresponden con la señal emitida. Este tipo de sensores son especialmente útiles en los sistemas de ventilación mecánica higrorregulables, ya que permiten regular el caudal de aire renovado en función de la humedad ambiental.
Estos sistemas pueden emplearse tanto en viviendas individuales como colectivas. En este último caso se utilizan sistemas de ventilación individualizados que llevan a cabo un barrido y posterior renovación del aire contaminado de los locales. Al ser independiente se consigue disponer de aire interior de calidad y autonomía en el consumo de cada vivienda.
Cuando el sistema higrorregulable es centralizado se puede utilizar indistintamente en viviendas unifamiliares y plurifamiliares. El sensor de humedad manda una señal a las bocas de extracción higrorregulables situadas en baños, aseos y cocina por donde el aire viciado se extrae cuando es necesario. El aire limpio entra en el salón y los dormitorios por las entradas de aire higrorregulables ubicadas en la carpintería de las ventanas, una vez que el sensor ha detectado que los valores de humedad en el interior no son los adecuados.
LDR – Fotorresistencia – fotorresistor
Un fotorresistor o fotorresistencia es un componente electrónico cuya resistencia disminuye con el aumento de intensidad de luz incidente. Puede también ser llamado fotoconductor, célula fotoeléctrica o resistor dependiente de la luz, cuyas siglas, LDR, se originan de su nombre en inglés (light-dependent resistor). Su cuerpo está formado por una célula fotorreceptora y dos patillas. En la siguiente imagen se muestra su símbolo eléctrico.
El LDR o fotorresistencia es un elemento muy útil para aplicaciones en circuitos donde se necesita detectar la ausencia de luz de día.
El valor de resistencia eléctrica de un LDR es bajo cuando hay luz incidiendo en él (puede descender hasta 50 ohms) y muy alto cuando está a oscuras (varios megaohmios).
La variación del valor de la resistencia tiene cierto retardo, diferente si se pasa de oscuro a iluminado o de iluminado a oscuro. Esto limita a no usar los LDR en aplicaciones en las que la señal luminosa varía con rapidez. El tiempo de respuesta típico de un LDR está en el orden de una décima de segundo. Esta lentitud da ventaja en algunas aplicaciones, ya que se filtran variaciones rápidas de iluminación que podrían hacer inestable un sensor. En otras aplicaciones la lentitud de la detección no es importante.
Bluetooth
Bluetooth es una especificación industrial para Redes Inalámbricas de Área Personal (WPAN) creado por Bluetooth Special Interest Group, Inc. que posibilita la transmisión de voz y datos entre diferentes dispositivos mediante un enlace por radiofrecuencia en la banda ISM de los 2.4 GHz. Los principales objetivos que se pretenden conseguir con esta norma son:
- Facilitar las comunicaciones entre equipos móviles.
- Eliminar los cables y conectores entre estos.
- Ofrecer la posibilidad de crear pequeñas redes inalámbricas y facilitar la sincronización de datos entre equipos personales.
Los dispositivos que con mayor frecuencia utilizan esta tecnología pertenecen a sectores de las telecomunicaciones y la informática personal, como PDA, teléfonos móviles, computadoras portátiles, ordenadores personales, impresoras o cámaras digitales.
Se denomina Bluetooth al protocolo de comunicaciones diseñado especialmente para dispositivos de bajo consumo, que requieren corto alcance de emisión y basados en transceptores de bajo costo.
Los dispositivos que incorporan este protocolo pueden comunicarse entre sí cuando se encuentran dentro de su alcance. Las comunicaciones se realizan por radiofrecuencia de forma que los dispositivos no tienen que estar alineados y pueden incluso estar en habitaciones separadas si la potencia de transmisión es suficiente. Estos dispositivos se clasifican como "Clase 1", "Clase 2" o "Clase 3" o "Clase 4" en referencia a su potencia de transmisión, siendo totalmente compatibles los dispositivos de una caja de ordenador.
| Clase | Potencia máxima permitida
(mW) | Potencia máxima permitida
(dBm ) | Alcance
(aproximado) |
|---|
| Clase 1 | 100 mW | 20 dBm | ~100 metros |
|---|
| Clase 2 | 2.5 mW | 4 dBm | ~5-10 metros |
|---|
| Clase 3 | 1 mW | 0 dBm | ~1 metro |
|---|
| Clase 4 | 0.5 mW | 0 dBm | ~0.5 metro |
|---|
Servomotor
El servomotor es un dispositivo electromecánico que consiste en un motor eléctrico, un juego de engranes y una tarjeta de control, todo dentro de una carcasa de plástico. Un servo tiene la capacidad de ser controlado en posición. Es capaz de ubicarse en cualquier posición dentro de un rango de operación generalmente de 180º pero puede ser fácilmente modificado para tener un giro libre de 360º. Los servos se suelen utilizar en robótica, automática y modelismo (vehículos por radio-control, RC) debido a su gran precisión en el posicionamiento.
Los servomotores funcionan por medio de modulación de ancho de pulso (PWM) Todos los servos disponen de tres cables, dos para alimentación Vcc y Gnd (4.8 a 6 [V]) y un tercero para aplicar el tren de pulsos de control, que hace que el circuito de control diferencial interno ponga el servo en la posición indicada.
La frecuencia usada para mandar la secuencia de pulsos al servomotor es de 50 Hz esto significa que cada ciclo dura 20 ms, Las duraciones de cada pulso se interpretan como comandos de posicionamiento del motor, mientras que los espacios entre cada pulso son despreciados.
Dado que existen algunas pequeñas diferencias entre las distintas marcas de servos, en la tabla 1 están indicados las características técnicas de varias marcas que comercializan este producto.
REDUCTOR O MOTORREDUCTOR
Los reductores y motorreductores mecánicos de velocidad se pueden contar entre los inventos más antiguos de la humanidad y aún en estos tiempos del siglo XXI se siguen utilizando prácticamente en cada máquina que tengamos a la vista, desde el más pequeño reductor o motorreductor capaz de cambiar y combinar velocidades de giro en un reloj de pulsera, cambiar velocidades en un automóvil, hasta enormes motorreductores capaces de dar tracción en buques de carga, molinos de cemento, grandes máquinas cavadoras de túneles o bien en molinos de caña para la fabricación de azúcar.
Un motorreductor tiene un motor acoplado directamente, el reductor no tiene un motor acoplado directamente.
La sencillez del principio de funcionamiento y su grado de utilidad en una gran variedad de aplicaciones es lo que ha construido la trascendencia de este invento al través de los siglos.
A continuación se dan los principios básicos de un reductor o motorreductor de velocidad:
Supongamos que la rueda “A” de la fig.1 tiene un diámetro de 5 cm. Su perímetro será entonces de 5 x 3.1416 = 15.71 cm. El perímetro es la longitud total del envolvente de la rueda. Una rueda “B” de 15 cm de diámetro y 47.13 cm de perímetro (15 x 3.1416) está haciendo contacto con el perímetro de la rueda “A” (fig 2)

















{kind=link}